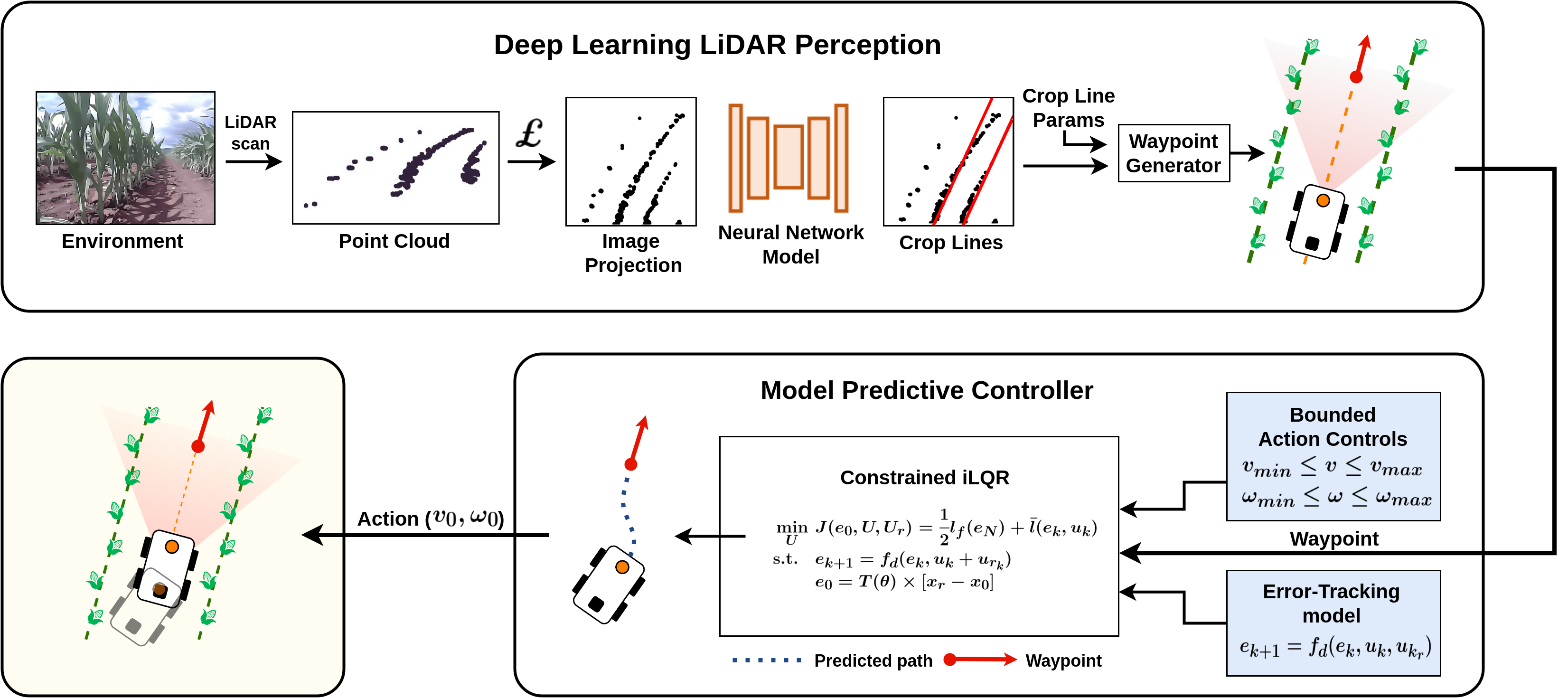
CROW: A Self-Supervised Crop Row Navigation Algorithm for Agricultural Fields
Journal of Intelligent & Robotic Systems 111 (1), 28, 2025

I am a Ph.D. student in Computer Science at the University of Illinois Urbana-Champaign (UIUC), where I will conduct research in the Distributed Autonomous Systems Laboratory (DASLab) under the supervision of Professor Girish Chowdhary. Prior to this, I was engaged in research at the University of São Paulo (USP), under the mentorship of Professor Marcelo Becker.
My research focuses on the development of advanced robotic systems that learn, adapt, and interact in complex, changing outdoor environments. I am currently working on loco-manipulation frameworks, emphasizing the integration of physics-based models and long-term reasoning for robust task planning and action execution in unstructured terrain. Key research areas include: