Research Projects
This page showcases my research projects.
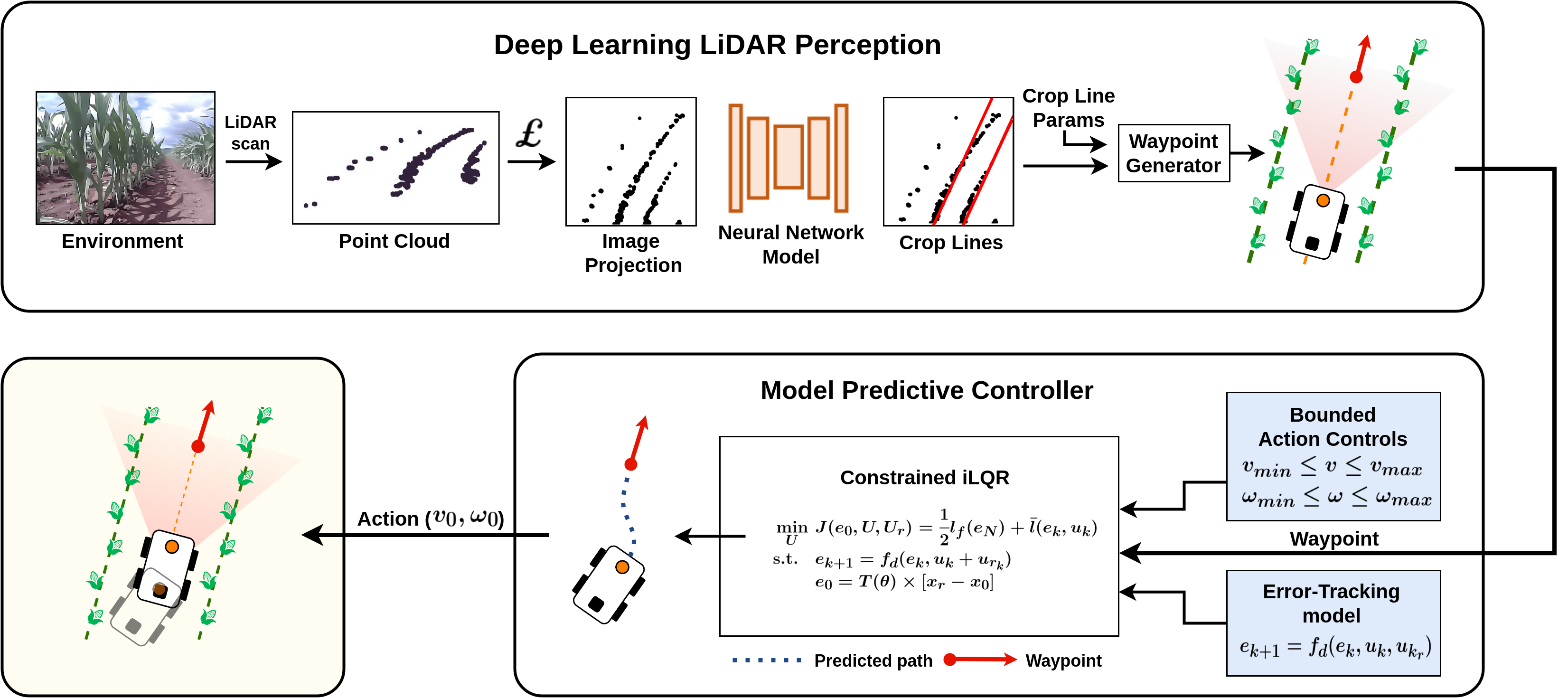
CROW is a self-supervised navigation system developed for autonomous operation in structured agricultural fields. It utilizes only LiDAR data to perceive and follow crop rows, without relying on GPS or external localization systems. This approach enables fully local navigation, allowing robots to adapt in real time to the field geometry while maintaining robustness across different planting conditions.